
In cooperative multi-agent reinforcement studying (MARL), as a result of its on-policy nature, coverage gradient (PG) strategies are usually believed to be much less pattern environment friendly than worth decomposition (VD) strategies, that are off-policy. Nevertheless, some recent empirical studies exhibit that with correct enter illustration and hyper-parameter tuning, multi-agent PG can obtain surprisingly strong performance in comparison with off-policy VD strategies.
Why might PG strategies work so effectively? On this put up, we’ll current concrete evaluation to indicate that in sure situations, e.g., environments with a extremely multi-modal reward panorama, VD may be problematic and result in undesired outcomes. In contrast, PG strategies with particular person insurance policies can converge to an optimum coverage in these circumstances. As well as, PG strategies with auto-regressive (AR) insurance policies can study multi-modal insurance policies.
Determine 1: completely different coverage illustration for the 4-player permutation recreation.
CTDE in Cooperative MARL: VD and PG strategies
Centralized coaching and decentralized execution (CTDE) is a well-liked framework in cooperative MARL. It leverages world data for more practical coaching whereas conserving the illustration of particular person insurance policies for testing. CTDE may be carried out through worth decomposition (VD) or coverage gradient (PG), main to 2 several types of algorithms.
VD strategies study native Q networks and a mixing operate that mixes the native Q networks to a world Q operate. The blending operate is normally enforced to fulfill the Particular person-International-Max (IGM) precept, which ensures the optimum joint motion may be computed by greedily selecting the optimum motion domestically for every agent.
In contrast, PG strategies straight apply coverage gradient to study a person coverage and a centralized worth operate for every agent. The worth operate takes as its enter the worldwide state (e.g., MAPPO) or the concatenation of all of the native observations (e.g., MADDPG), for an correct world worth estimate.
The permutation recreation: a easy counterexample the place VD fails
We begin our evaluation by contemplating a stateless cooperative recreation, particularly the permutation recreation. In an $N$-player permutation recreation, every agent can output $N$ actions ${ 1,ldots, N }$. Brokers obtain $+1$ reward if their actions are mutually completely different, i.e., the joint motion is a permutation over $1, ldots, N$; in any other case, they obtain $0$ reward. Be aware that there are $N!$ symmetric optimum methods on this recreation.
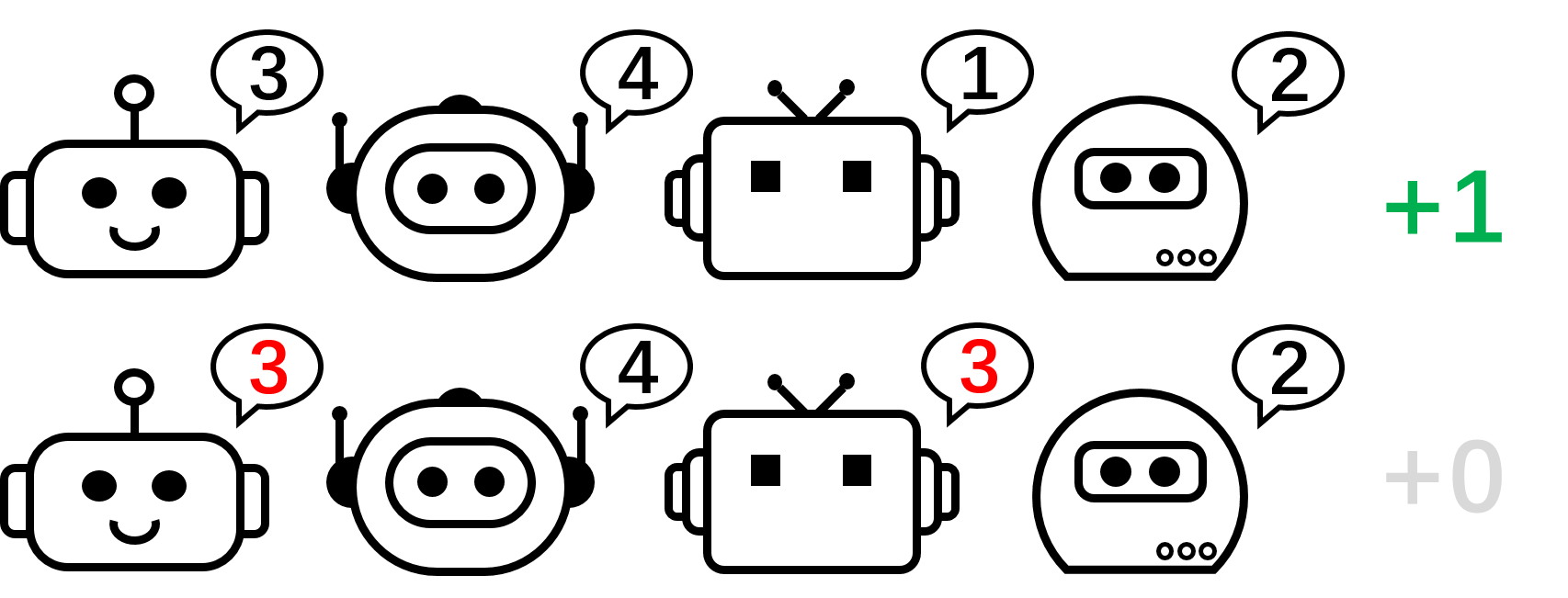
Determine 2: the 4-player permutation recreation.
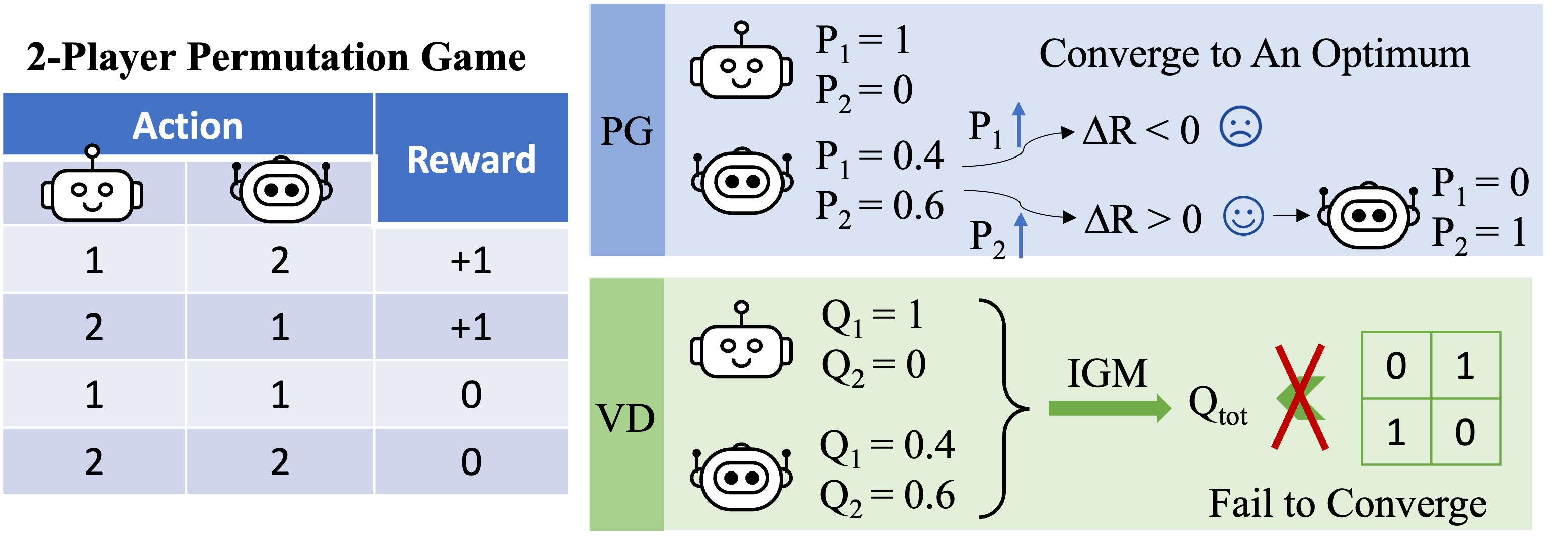
Determine 3: high-level instinct on why VD fails within the 2-player permutation recreation.
Allow us to deal with the 2-player permutation recreation now and apply VD to the sport. On this stateless setting, we use $Q_1$ and $Q_2$ to indicate the native Q-functions, and use $Q_textrm{tot}$ to indicate the worldwide Q-function. The IGM precept requires that
[argmax_{a^1,a^2}Q_textrm{tot}(a^1,a^2)={argmax_{a^1}Q_1(a^1),argmax_{a^2}Q_2(a^2)}.]
We show that VD can’t symbolize the payoff of the 2-player permutation recreation by contradiction. If VD strategies had been in a position to symbolize the payoff, we might have
[Q_textrm{tot}(1, 2)=Q_textrm{tot}(2,1)=1quad text{and}quad Q_textrm{tot}(1, 1)=Q_textrm{tot}(2,2)=0.]
If both of those two brokers has completely different native Q values (e.g. $Q_1(1)> Q_1(2)$), now we have $argmax_{a^1}Q_1(a^1)=1$. Then in keeping with the IGM precept, any optimum joint motion
[(a^{1star},a^{2star})=argmax_{a^1,a^2}Q_textrm{tot}(a^1,a^2)={argmax_{a^1}Q_1(a^1),argmax_{a^2}Q_2(a^2)}]
satisfies $a^{1star}=1$ and $a^{1star}neq 2$, so the joint motion $(a^1,a^2)=(2,1)$ is sub-optimal, i.e., $Q_textrm{tot}(2,1)<1$.
In any other case, if $Q_1(1)=Q_1(2)$ and $Q_2(1)=Q_2(2)$, then
[Q_textrm{tot}(1, 1)=Q_textrm{tot}(2,2)=Q_textrm{tot}(1, 2)=Q_textrm{tot}(2,1).]
In consequence, worth decomposition can’t symbolize the payoff matrix of the 2-player permutation recreation.
What about PG strategies? Particular person insurance policies can certainly symbolize an optimum coverage for the permutation recreation. Furthermore, stochastic gradient descent can assure PG to converge to considered one of these optima under mild assumptions. This implies that, despite the fact that PG strategies are much less standard in MARL in contrast with VD strategies, they are often preferable in sure circumstances which are frequent in real-world purposes, e.g., video games with a number of technique modalities.
We additionally comment that within the permutation recreation, with a view to symbolize an optimum joint coverage, every agent should select distinct actions. Consequently, a profitable implementation of PG should make sure that the insurance policies are agent-specific. This may be finished by utilizing both particular person insurance policies with unshared parameters (known as PG-Ind in our paper), or an agent-ID conditioned coverage (PG-ID).
PG outperforms current VD strategies on standard MARL testbeds
Going past the straightforward illustrative instance of the permutation recreation, we prolong our research to standard and extra sensible MARL benchmarks. Along with StarCraft Multi-Agent Problem (SMAC), the place the effectiveness of PG and agent-conditioned coverage enter has been verified, we present new leads to Google Analysis Soccer (GRF) and multi-player Hanabi Challenge.
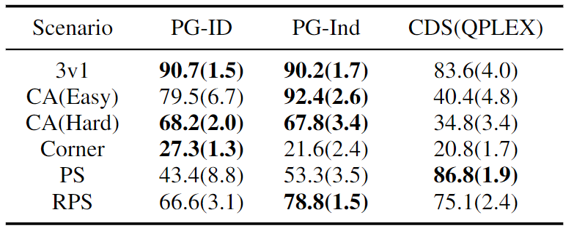
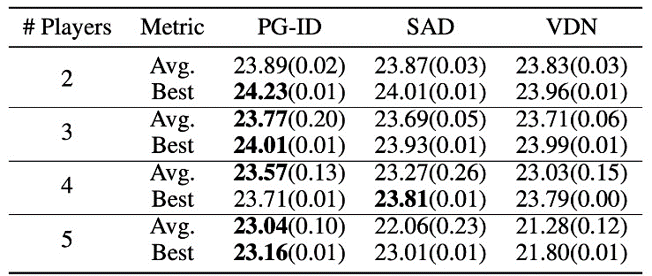
Determine 4: (left) profitable charges of PG strategies on GRF; (proper) greatest and common analysis scores on Hanabi-Full.
In GRF, PG strategies outperform the state-of-the-art VD baseline (CDS) in 5 situations. Curiously, we additionally discover that particular person insurance policies (PG-Ind) with out parameter sharing obtain comparable, generally even larger profitable charges, in comparison with agent-specific insurance policies (PG-ID) in all 5 situations. We consider PG-ID within the full-scale Hanabi recreation with various numbers of gamers (2-5 gamers) and examine them to SAD, a powerful off-policy Q-learning variant in Hanabi, and Worth Decomposition Networks (VDN). As demonstrated within the above desk, PG-ID is ready to produce outcomes corresponding to or higher than the perfect and common rewards achieved by SAD and VDN with various numbers of gamers utilizing the identical variety of atmosphere steps.
Past larger rewards: studying multi-modal habits through auto-regressive coverage modeling
Apart from studying larger rewards, we additionally research study multi-modal insurance policies in cooperative MARL. Let’s return to the permutation recreation. Though now we have proved that PG can successfully study an optimum coverage, the technique mode that it lastly reaches can extremely rely on the coverage initialization. Thus, a pure query will probably be:
Can we study a single coverage that may cowl all of the optimum modes?
Within the decentralized PG formulation, the factorized illustration of a joint coverage can solely symbolize one specific mode. Due to this fact, we suggest an enhanced solution to parameterize the insurance policies for stronger expressiveness — the auto-regressive (AR) insurance policies.
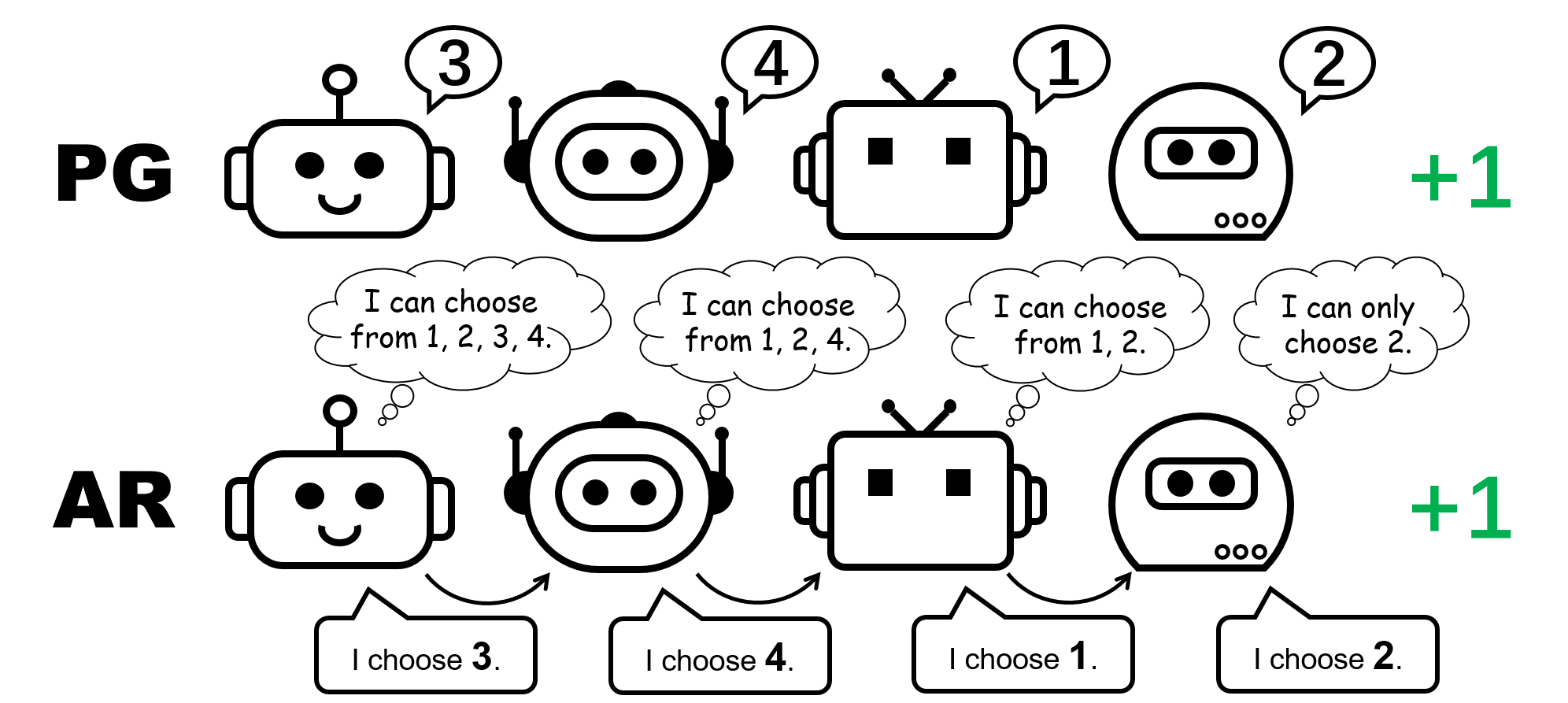
Determine 5: comparability between particular person insurance policies (PG) and auto-regressive insurance policies (AR) within the 4-player permutation recreation.
Formally, we factorize the joint coverage of $n$ brokers into the type of
[pi(mathbf{a} mid mathbf{o}) approx prod_{i=1}^n pi_{theta^{i}} left( a^{i}mid o^{i},a^{1},ldots,a^{i-1} right),]
the place the motion produced by agent $i$ relies upon by itself statement $o_i$ and all of the actions from earlier brokers $1,dots,i-1$. The auto-regressive factorization can symbolize any joint coverage in a centralized MDP. The solely modification to every agent’s coverage is the enter dimension, which is barely enlarged by together with earlier actions; and the output dimension of every agent’s coverage stays unchanged.
With such a minimal parameterization overhead, AR coverage considerably improves the illustration energy of PG strategies. We comment that PG with AR coverage (PG-AR) can concurrently symbolize all optimum coverage modes within the permutation recreation.
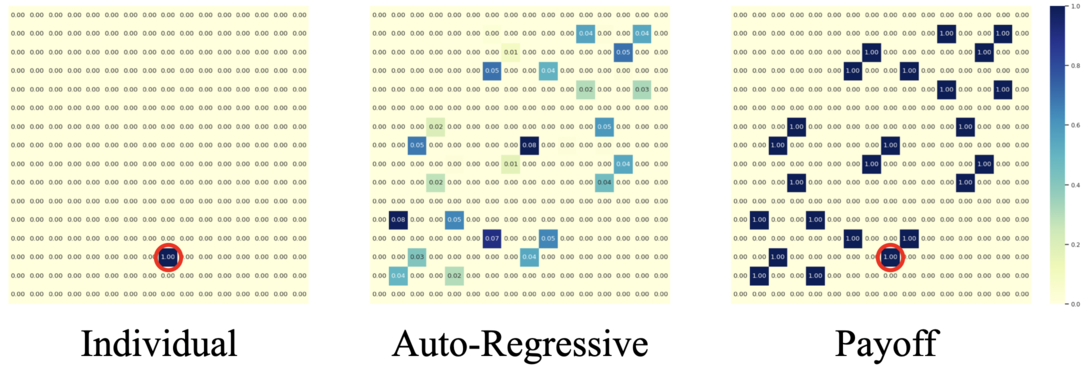
Determine: the heatmaps of actions for insurance policies realized by PG-Ind (left) and PG-AR (center), and the heatmap for rewards (proper); whereas PG-Ind solely converge to a particular mode within the 4-player permutation recreation, PG-AR efficiently discovers all of the optimum modes.
In additional complicated environments, together with SMAC and GRF, PG-AR can study attention-grabbing emergent behaviors that require robust intra-agent coordination which will by no means be realized by PG-Ind.
Determine 6: (left) emergent habits induced by PG-AR in SMAC and GRF. On the 2m_vs_1z map of SMAC, the marines hold standing and assault alternately whereas making certain there is just one attacking marine at every timestep; (proper) within the academy_3_vs_1_with_keeper situation of GRF, brokers study a “Tiki-Taka” model habits: every participant retains passing the ball to their teammates.
Discussions and Takeaways
On this put up, we offer a concrete evaluation of VD and PG strategies in cooperative MARL. First, we reveal the limitation on the expressiveness of standard VD strategies, displaying that they might not symbolize optimum insurance policies even in a easy permutation recreation. In contrast, we present that PG strategies are provably extra expressive. We empirically confirm the expressiveness benefit of PG on standard MARL testbeds, together with SMAC, GRF, and Hanabi Problem. We hope the insights from this work may benefit the neighborhood in the direction of extra basic and extra highly effective cooperative MARL algorithms sooner or later.
This put up is predicated on our paper: Revisiting Some Frequent Practices in Cooperative Multi-Agent Reinforcement Studying (paper, website).

